- подготовка
- Загрузите код тестирования
- Тест Bluetooth
- Загрузить код для дистанционного управления
- Сводка кода
- Дополнительная информация
- документы
Поскольку роботу позволено выполнять основные задачи, теперь мы добавили в него еще одну функцию, а именно управление роботом с мобильного телефона через Bluetooth. Кроме того, вы можете добавить больше интересных световых эффектов для вашего робота. В сочетании с нашим новым приложением, я верю, что вам это очень понравится. В то же время мы также оптимизировали код для управления Bluetooth, чтобы вам было удобнее им пользоваться.
подготовка
Примечание. На вашем телефоне должна быть установлена iOS 8.1. После оптимизации вы можете легко пользоваться приложением на iPhone 5, iPhone 6 или iPhone 6 Plus. <br> В настоящее время мы только разработали приложение для iOS, но оно не доступно для Android.
Для пользователей iPhone: пожалуйста, скачайте GoBLE из App Store. Если экран показан на фотографии ниже, поздравляем! У вас есть правильное приложение!

Загрузите код тестирования
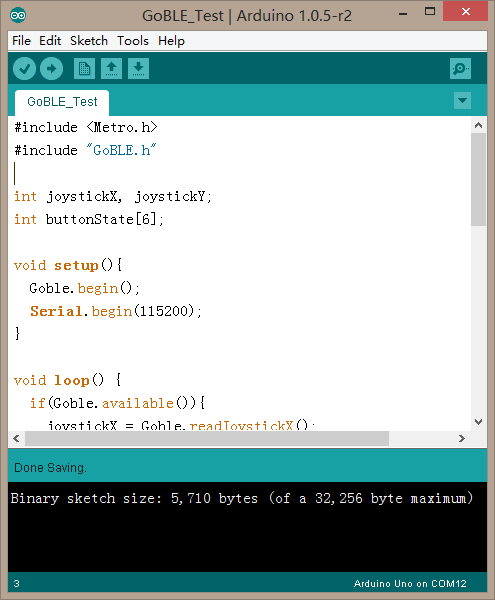
Пожалуйста, подключите плату Romeo BLE к компьютеру с помощью USB-кабеля. Код тестирования с именем GoBLE_Test.ino можно найти в программном пакете. Это только позволяет проверить сигнал с вашего iPhone на ПК. СКАЧАТЬ ЭТО И ПРОВЕРИТЬ.
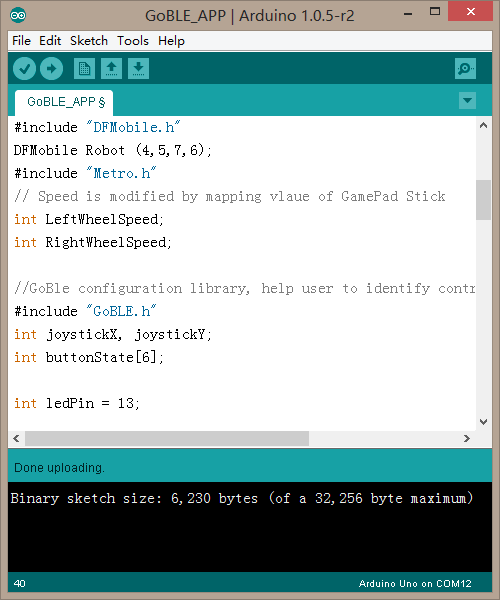
Не забудьте загрузить Библиотека GoBLE перед загрузкой кода тестирования. После загрузки появится сообщение «Закончена загрузка».
 <br>
<br>
Тест Bluetooth
Если вы закончили загружать тестовый код, теперь давайте начнем Bluetooth-соединение, чтобы подключить вашего робота к iPhone. Во-первых, не забудьте включить мобильный Bluetooth, а затем откройте приложение GoBLE. Теперь ваш экран может выглядеть так! 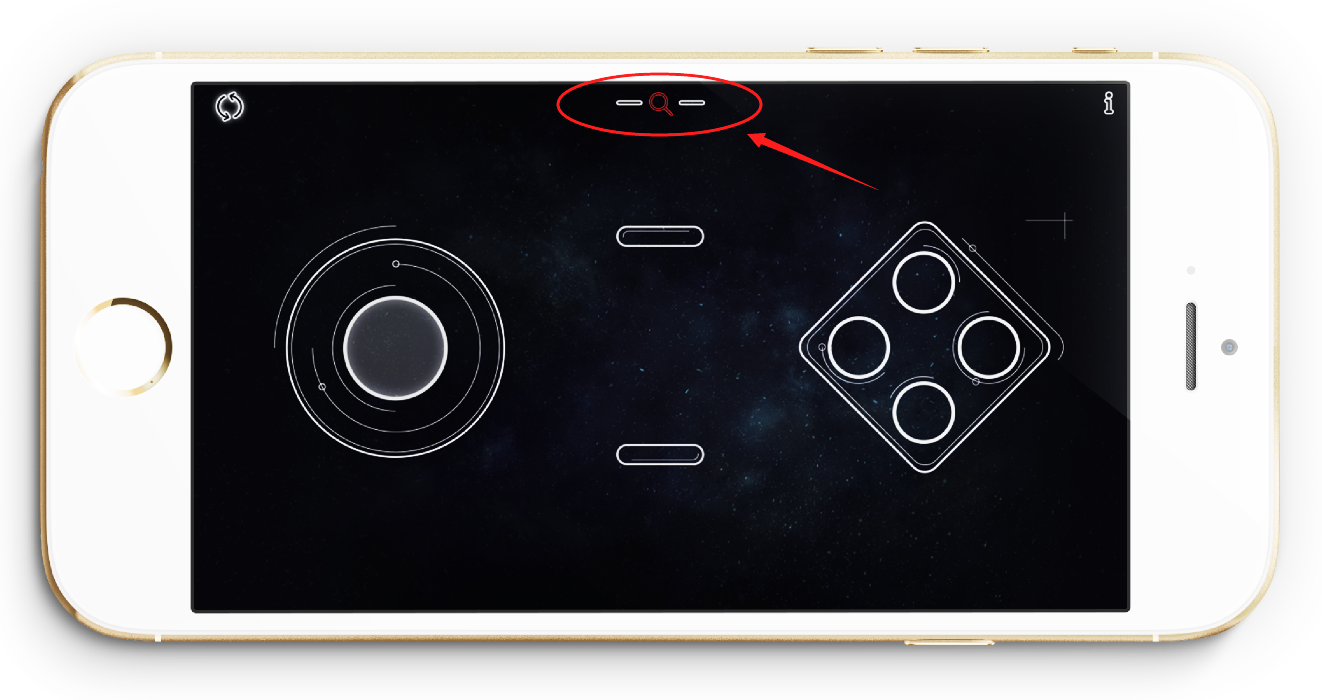 Нажмите кнопку поиска Bluetooth (она выглядит как красное увеличительное стекло). Теперь она покажет вам все устройства Bluetooth, перечисленные на экране. Затем вам нужно только выбрать один из них, который соответствует названию доски Romeo BLE. Нажмите UUID, и они начнут связываться.
Нажмите кнопку поиска Bluetooth (она выглядит как красное увеличительное стекло). Теперь она покажет вам все устройства Bluetooth, перечисленные на экране. Затем вам нужно только выбрать один из них, который соответствует названию доски Romeo BLE. Нажмите UUID, и они начнут связываться. 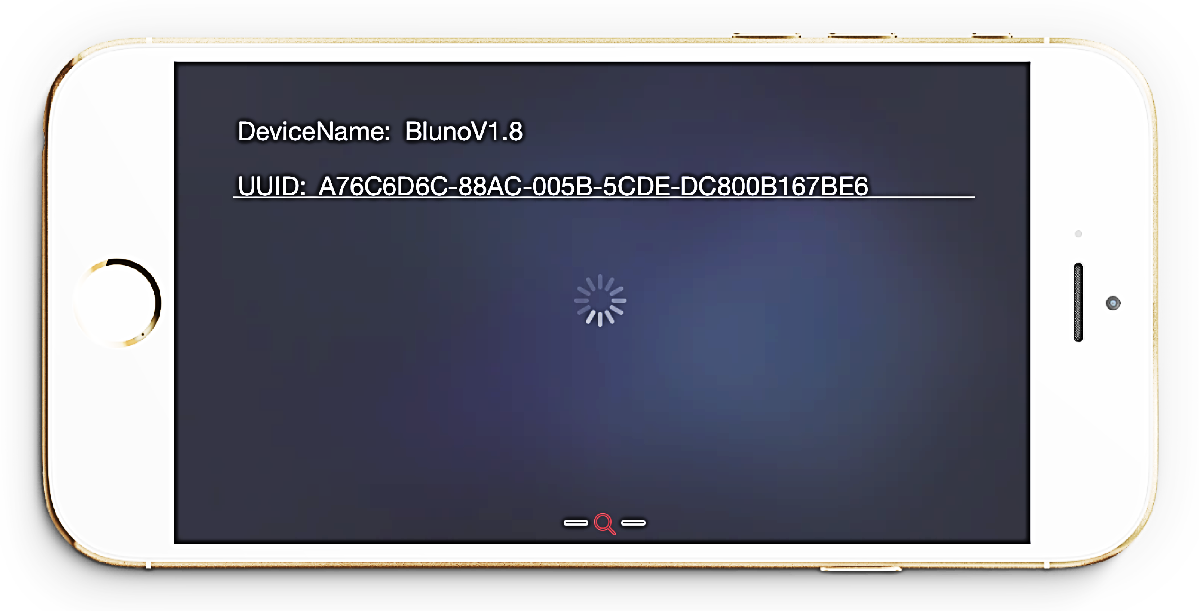
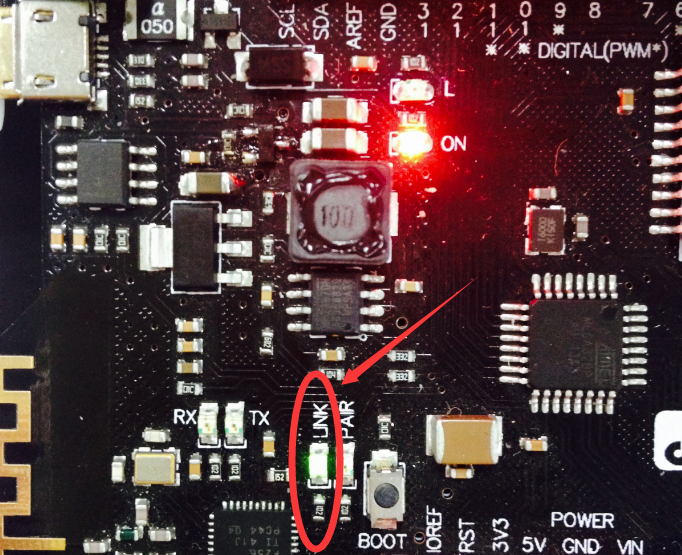
После подключения цвет ключа поиска Bluetooth изменится с красного на зеленый, как показано на рисунке ниже. 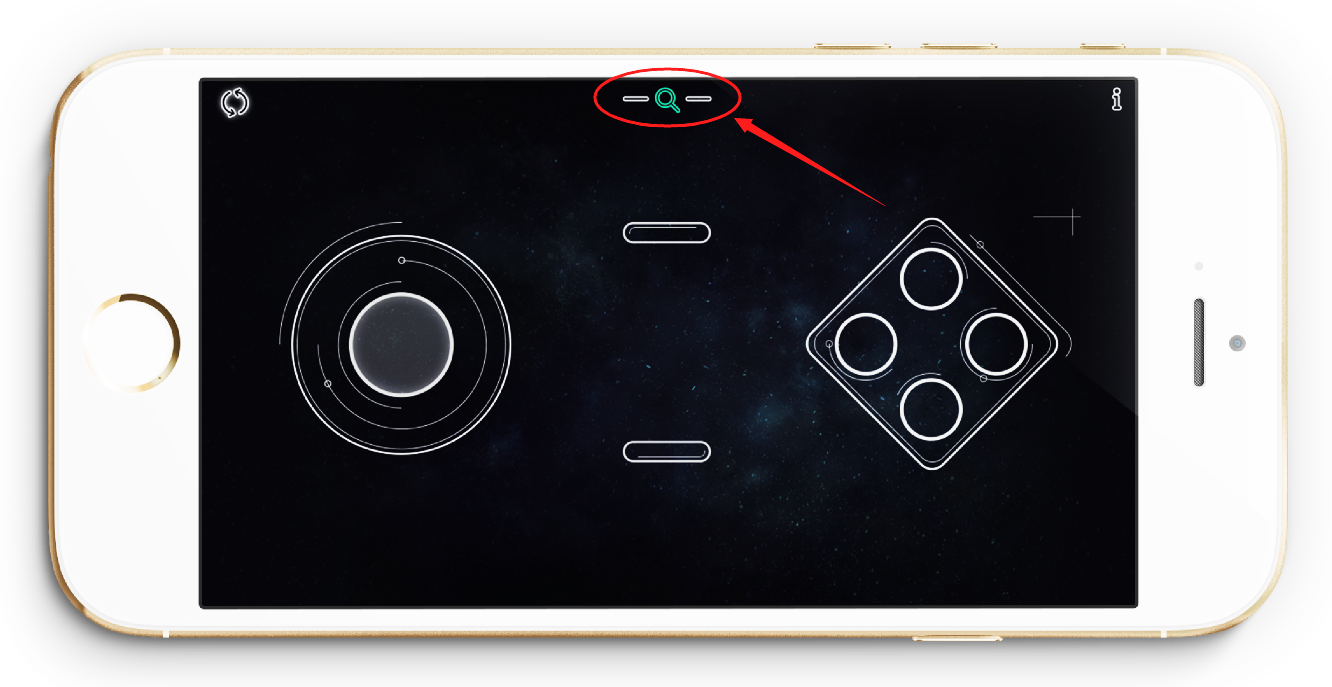 В то же время загорится светодиод LINK на плате, это означает, что ваш iPhone был подключен к контроллеру Romeo BLE.
В то же время загорится светодиод LINK на плате, это означает, что ваш iPhone был подключен к контроллеру Romeo BLE.
Теперь давайте проверим, может ли контроллер успешно принимать сигнал с вашего iPhone.
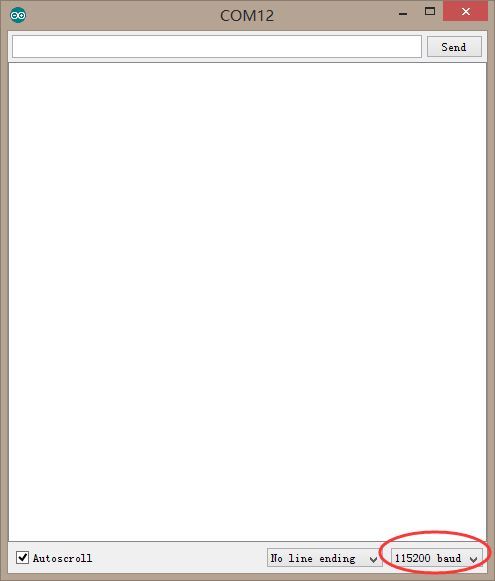
- Вернитесь к интерфейсу Arduino IDE и нажмите Serial Monitor в верхнем правом углу.
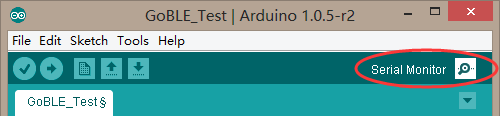
- Появится диалог, как показано на рисунке ниже. Во-первых, скорость передачи последовательного порта должна быть установлена равной 115200, как показано красным кружком ниже.
- Теперь вы можете достать свой iPhone и случайным образом провести виртуальным джойстиком или нажать кнопку на экране. Если ничего другого, вы увидите соответствующее значение на последовательном мониторе. И значение джойстика на последовательном мониторе будет изменено, когда вы проведете виртуальный джойстик на экране. Вы обнаружите, что значение увеличивается при перемещении джойстика вверх или уменьшается при перемещении джойстика вниз. Вы нашли это? Идентификатор кнопки означает, какую кнопку вы нажимаете.
Загрузить код для дистанционного управления
Если все в порядке, давайте продолжим и загрузим код для удаленного управления на плату Arduino.
«Есть очень ключевой момент, о котором стоит помнить! '' 'Ваш iPhone уже был подключен к плате Romeo BLE на последнем этапе тестирования. Однако вы не можете загрузить код на плату Romeo BLE, если между вашим телефоном и платой установлен Bluetooth. Таким образом, вы должны сначала отключить соединение Bluetooth. Кроме того, вы можете загрузить код еще раз, если плата была отключена от телефона. ЭТА ТОЧКА ОЧЕНЬ ВАЖНА! Вы должны помнить это.
Существует два способа прервать соединение. Во-первых, вы можете просто отключить питание Remeo BLE и включить его снова. Другой способ заключается в том, что просто выключите Bluetooth на вашем телефоне.
После отключения вы можете снова загрузить пример кода. Код называется GoBLE_APP.ino в пакете кода.
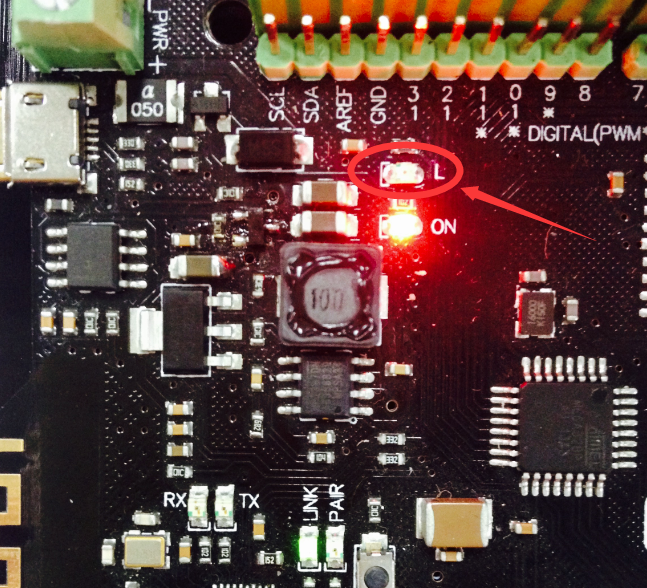
- После успешной загрузки вы можете следовать красной стрелке на рисунке ниже и провести джойстиком, чтобы управлять своим роботом. Также вы можете нажать красную кнопку, чтобы включить или выключить светодиод на плате, подключенной с помощью PIN13.

Сводка кода
Поиграв в робота, давайте начнем изучать, как использовать код. Больше нет слов для тестирования кода для GoBLE_test . Тогда мы просто перейдем к GoBLE_APP.
Нет необходимости обсуждать основной код - давайте просто посмотрим на часть, касающуюся управления bluethooth. Если вы хотите дистанционно управлять роботом, будут использоваться две библиотеки с именами Metro и GoBLE.
#include "Metro.h" #include "GoBLE.h" <br> int joystickX, joystickY; int buttonState [7]; <br>
ДжойстикX, джойстикY и buttonState [6], три переменные, определены для библиотеки GoBLE. Они используются для хранения значения состояния для оси X, оси Y и значений шести кнопок.
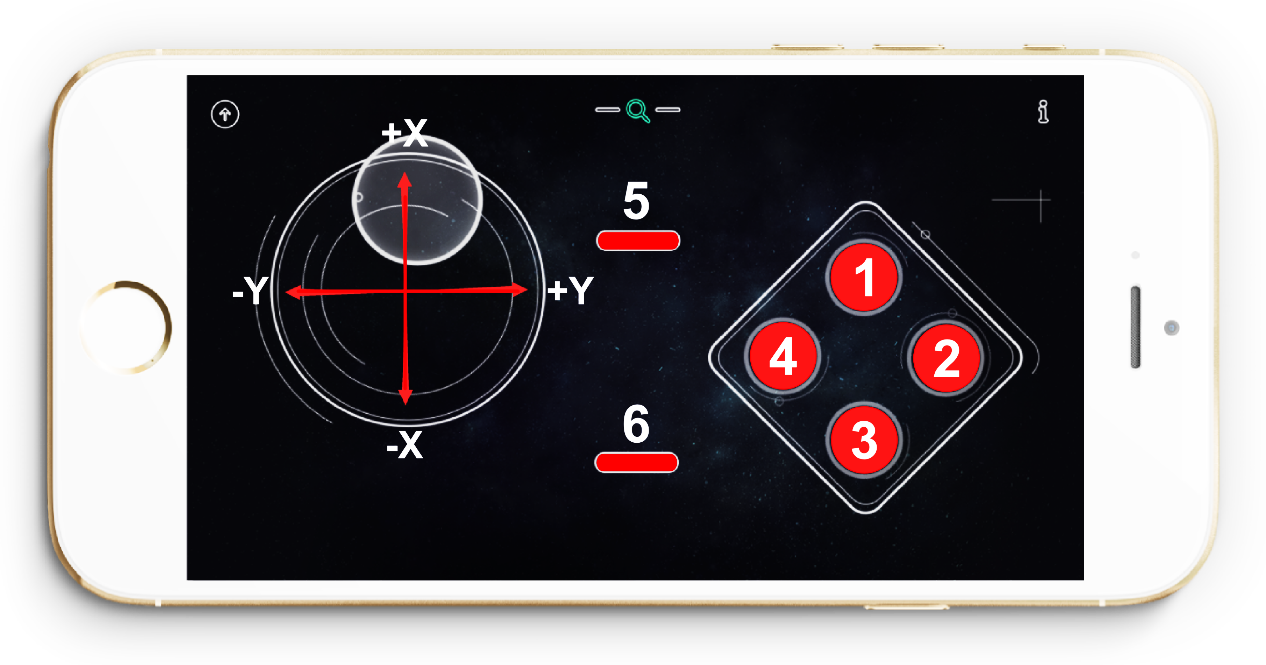
Карта ниже показывает расположение всех кнопок. Возможно, вы знаете значения + X, -X, + Y и –Y, если проанализировали изменение значений состояния. X & Y - направления движения джойстика. »+, -« показывают тренды значения. «+» Означает, что значение состояния увеличивается. А «-» означает, что значение состояния уменьшается.
Начальная настройка должна быть записана в функции Setup () .
Goble.begin ();
Эта строка используется для запуска настройки Bluetooth. И это нельзя пропустить, когда вы используете код Bluetooth на вашей доске.
Serial.begin (115200);
Фактически эта линия была использована на стадии тестирования. Он используется для инициирования последовательного порта. Если вы хотите прочитать значение из последовательного монитора, вы должны записать это утверждение в функцию настройки. И, также необходимо установить скорость передачи данных. Поскольку скорость передачи данных по Bluetooth особая, необходимо установить значение 115200. Убедитесь, что скорость передачи установлена, иначе это может вызвать некоторые проблемы.
«Пожалуйста, продолжайте смотреть вниз. '' 'Следующая строка является функцией Goble.available ()
if (Goble.available ()) {сделать что-нибудь; }
Это означает, что следующим действием будет получение фигуры через Bluetooth.
То, что написано в скобках, будет нашим следующим действием. Сначала нам нужно проанализировать полученную цифру. Следующие два утверждения должны прочитать значение по осям X и Y.
joystickX = Goble.readJoystickX (); joystickY = Goble.readJoystickY (); // Serial.print ("joystickX:"); // Serial.print (joystickX); // Serial.print ("joystickY:"); // Serial.println (joystickY);
Угадайте, что означают четыре оператора Serial.print () выше. Это связано с серийным. Сериал должен распечатывать полученные данные, что удобно для отладки и оптимизации кода.
«//» означает аннотацию следующего содержания. Эти четыре предложения не будут включены при компиляции кода. А именно, никакие данные не будут отправлены в серийный номер, как только мы используем аннотацию для этих четырех операторов.
'' 'Пожалуйста, обратитесь к справочной странице веб-сайта Arudino ( www.arduino.cc ) для дополнительной информации.
buttonState [SWITCH_UP] = Goble.readSwitchUp (); buttonState [SWITCH_DOWN] = Goble.readSwitchDown (); buttonState [SWITCH_LEFT] = Goble.readSwitchLeft (); buttonState [SWITCH_RIGHT] = Goble.readSwitchRight (); buttonState [SWITCH_SELECT] = Goble.readSwitchSelect (); buttonState [SWITCH_START] = Goble.readSwitchStart ();
Все содержимое выше используется для загрузки информации о состоянии кнопок. Расположение кнопок выглядит следующим образом.
- SWITCH_UP - 1
- SWITCH_RIGHT - 2
- SWITCH_DOWN - 3
- SWITCH_LEFT - 4
- SWITCH_SELECT - 5
- SWITCH_START - 6
Нам нужно обработать все прочитанные данные, прежде чем мы начнем их использовать. Значение, считываемое с джойстика, должно быть сопоставлено с частотой вращения колес нашего робота. Таким образом, скорость вращения колес оказывается между -255 и 255.。
int SpeedX = 2 * джойстикX-256; int SpeedY = 2 * джойстикY-256;
Serial.print («Скорость:»); Serial.print (SpeedX); Serial.print (""); Serial.println (Speedy);
Также сериал распечатал бы скорость. Если в этом нет необходимости, вы можете добавить «//» в начале, чтобы удалить его.
Теперь давайте контролировать робота и заставить его двигаться.
Если (переместите джойстик вверх или (||) вниз) {робот двигается вперед или назад; } If (переместите джойстик вправо или (||) влево) {робот переместится вправо или влево} If (ось X джойстика удерживается в центре и (&&) ось Y джойстика удерживается в центр) {Робот останавливается; }
Соответствующие коды следующие:
if (SpeedX> 200 || SpeedX <-200) {LeftWheelSpeed = SpeedX; RightWheelSpeed = SpeedX; Robot.Speed (LeftWheelSpeed, RightWheelSpeed); } else if (SpeedY> 200 || SpeedY <-200) {LeftWheelSpeed = SpeedY-80; RightWheelSpeed = -SpeedY-80; Robot.Speed (LeftWheelSpeed, RightWheelSpeed); } else if (SpeedX == 0 && SpeedY == 0) {Robot.Speed (0,0); }
Контакт 13 должен быть определен в начале кода.
int ledPin = 13;
Последний код используется для управления светодиодом на плате, подключенной к PIN13.
pinMode (ledPin, OUTPUT);
Настройте режим вывода для светодиода, написав функцию setup (). Пожалуйста, обратитесь к инструкции для функции pinMode () на веб-сайте Arduino (www.arduino.cc).
Следующие выражения показывают состояние кнопок. После нажатия кнопки № 1 светодиод будет гореть. Это означает, что светодиодный контакт установлен на ВЫСОКИЙ.
if (buttonState [1] == PRESSED) {digitalWrite (ledPin, HIGH); }
После отпускания кнопки № 1 светодиод погаснет. Это означает, что светодиодный контакт установлен на НИЗКИЙ.
if (buttonState [1] == RELEASED) {digitalWrite (ledPin, LOW); }
Это все для кодирования сегодня. Разве это не весело? Так что, это не невозможно написать код для вас, верно? Вы можете попробовать изменить кнопку для управления светодиодной подсветкой, изменив код. Это определенно интереснее, когда вы можете управлять им с помощью своего кода. '' 'Теперь начните веселиться с вашим роботом! «»»
Дополнительная информация
Сервис UUID
DF Robot BLE Подробности: Сервис
UUID: 0000dfb0-0000-1000-8000-00805f9b34fb Характеристики
Имя: UUID последовательного порта: 0000dfb1-0000-1000-8000-00805f9b34fb Имя: UUID команды: 0000dfb2-0000-1000-8000-00805f9b34fb
документы
GoBle APP
Библиотеки
Похожие
Туристическая информация ЩецинЦентральная туристическая информация в Щецине Щецин Западная Померания находится в бывшем Поморском герцогском замке недалеко от порта. Во время нашего визита вы могли говорить по-немецки с персоналом в туристической информации. Вы можете купить туристическую карту Щецина. С картой вы получаете скидку в некоторых музеях. Особенно интересной для дневных посетителей является возможность путешествовать на общественном транспорте, например, на автобусе бесплатно. Во время нашего визита в Щецин, Тест Sony Xperia SP
В этом году Sony кладет один смартфон за другим на прилавки магазинов. Xperia SP станет седьмым устройством за шесть месяцев, чтобы присоединиться к широкому кругу японцев. Xperia SP располагается где-то в среднем классе, о чем свидетельствуют дисплей HD и двухъядерный процессор с частотой 1,7 ГГц. Прозрачный световой элемент под дисплеем привлекает внимание, но это не делает смартфон хорошим. Рекомендуется ли Xperia SP или Sony с точки зрения дизайна, аппаратного обеспечения и Sony Xperia S [ТЕСТ]
Sony Xperia S , безусловно, является высококлассным устройством, работающим на двухъядерном процессоре 1,5 ГГц с 1 ГБ оперативной памяти и 32 ГБ встроенной флэш-памяти . Большой - 4,3 "дисплей имеет разрешение 720 x 1280 пикселей, что обеспечивает воспроизведение в формате Full HD 720p. В задней части Тюнер Cabletech URZ0191 DVB-T [ТЕСТ]
Cabletech URZ0191 - это тюнер большой емкости, устройство, которое не только обеспечивает прием цифрового наземного телевидения. Одной из сильных сторон тюнера является приемник InView, который позволяет использовать сеть WiFi, использовать интернет-ресурсы на экране компьютера. Подключение устройства возможно благодаря наличию USB-порта на передней панели декодера. Полная техническая спецификация выглядит следующим образом: iPad 2
... Bluetooth"> Bluetooth 2.1 + EDR Онлайн-сервисы iTunes Store , App Store Размеры 241,2 × 185,7 × 8.8 мм Масса 601 г (Wi-Fi) 607-613 г (Wi-Fi + 3G) Связанные статьи iPod iPod Shuffle iPod Nano iPhone
... кодовое название Purple 1 не был доведен до конца. Следующим этапом для Apple стало участие в создании мобильного телефона «Motorola ROKR» Вышедший на рынок в сентябре 2005 года. Устройство позиционировался как плеер, тесно интегрированный с проигрывателем «ITunes» . Интерфейс плеера в телефоне был создан Тест Rim BlackBerry Bold 9790: наше мнение
Менее массивный (на 5 мм меньше по длине и ширине), чем 9900 BlackBerry Bold 9790 может выглядеть почти как скромный кривая , Тем не менее, когда-то в руках, сомнение больше не допускается. Его блестящая металлическая рама и пластиковая задняя часть из персиковой кожи придают ей прочность и превосходное сцепление. Как использовать мобильное устройство для управления домашним кинотеатром
... управления. Благодаря правильному выбору приложений и, в некоторых случаях, дополнительного оборудования, вы можете управлять всеми компонентами домашнего кинотеатра с одного устройства, которое почти всегда в ваших руках. Вот как. Использовать инфракрасный Подключите устройство Bluetooth, которые не имеют или не нуждаются приемопередатчик
Настройка устройства Bluetooth на компьютере под управлением Windows Как убедиться, что запущена служба Bluetooth Откройте Оснастку консоли управления Microsoft (MMC) для служб. Для этого выполните следующие действия. Windows Vista или Windows 7 Нажмите кнопку Пуск Скопируйте и вставьте (или введите) такую Бесплатные инструменты для тестирования портативных сетей LAN для Windows
У вас настроена гигабитная сеть, но вы никогда не чувствуете, что это так быстро, как должно быть. Передача файлов между компьютерами всегда занимает больше времени, чем обычно. Так как же определить, действительно ли вы используете большую часть своей сети? И как вы можете измерить производительность вашей сети не только на основе ощущений, но и в реальных цифрах? Вот 4 бесплатных портативных сетевых инструмента, которые могут помочь вам измерить и оценить производительность вашей сети. Обновление 51 Java 7 подписи кода теперь требуется для RIA
... код для приложений Applets и приложений Web Start с помощью подписи кода от доверенного центра сертификации (CA). Подписи кода позволяют конечным пользователям идентифицировать издателя, проверить дату подписания кода и убедиться, что исходный код не был изменен с момента его подписания. Чтобы обеспечить принудительное использование подписей кода во всех приложениях Applets и Web Start, Java обновила ползунок безопасности по умолчанию, чтобы блокировать многофункциональные интернет-приложения
Комментарии
3. Можно ли загрузить Cydia из Apple App Store?3. Можно ли загрузить Cydia из Apple App Store? Вы не можете скачать Cydia из магазина приложений Apple. Это сторонний магазин приложений. 4. Безопасен ли джейлбрейк? Если вы будете соблюдать осторожность, джейлбрейк - абсолютно безопасная процедура. Но вам всегда нужно проверять совместимость устройства и iOS, прежде чем переходить к процессу. Примечание. Полный джейлбрейк приведет к прекращению действия гарантии на ваше устройство. Как загрузить файлы YouTube на планшет или смартфон?
Как загрузить файлы YouTube на планшет или смартфон? В самом начале настройте свое устройство для загрузки сторонних приложений, которые недоступны в Google Play . Чтобы сделать это, выполните следующие действия: Перейдите в Настройки, а затем на вкладку Безопасность . Затем в разделе Администрирование устройства и установите флажок Неизвестные источники . Для чего следует загрузить Авант Браузер 2014, возможно достаточно обновить свой старый удобный браузер?
Для чего следует загрузить Авант Браузер 2014, возможно достаточно обновить свой старый удобный браузер? Отсутствие рекламы - будь всплывающее окно блокируется встроенным механизмом. Собственный поиск в поисковых системах Google, Яндекс. Уникальная возможность загружать / упорядочивать / закрывать / обновлять все страницы одним кликом мыши. Вы сможете установить браузер Avant Browser и использовать плагины, вкладки, а также настройки IE. Окно Com/us/app/videostar-telewizja-online/id919545883?
com/us/app/videostar-telewizja-online/id919545883?l=pl"> https://itunes.apple.com/us/app/videostar-telewizja-online/id919545883?l=pl (IOS) Включите Wi-Fi на вашем телефоне Скачать приложение (требуется предварительный вход) Приложение автоматически начнет загрузку на ваш телефон Следуйте инструкциям на экране готовый - Вы также Проводил ли Stiftung Warentest тест Smart TV?
Проводил ли Stiftung Warentest тест Smart TV? В августе 2018 года потребительский журнал Stiftung Warentest познакомился с несколькими телевизорами разных производителей. К сожалению, это сравнение лучших моделей скрыто за платежным барьером и может быть А теперь очень короткий тест - когда вы впервые сделали покупки онлайн?
А теперь очень короткий тест - когда вы впервые сделали покупки онлайн? Вы с ума сошли? Вы подозревали, что торговля скоро станет для вас обычным делом? И еще один тест: оглянись и посчитай тех, кто еще ничего не покупает в интернете. Из-за боязни неизвестного правит им. Я думаю, что это хороший тест. Это показывает, насколько мы поддаемся иллюзии, что в этом Интернете все уже есть, и все начинают день с проверки того, что нового в «сюжетной линии». Или хотя бы «перспективы». 5.1. Проводил ли Stiftung Warentest тест клавиатуры?
5.1. Проводил ли Stiftung Warentest тест клавиатуры? Исследование Stiftung Warentest, безусловно, будет полезным ориентиром при покупке. Критерии и результаты испытаний, установленные экзаменаторами, всегда очень поучительны. К сожалению, однако, организация потребителей до сих пор не провела ни тест клавиатуры, ни победителя теста клавиатуры. Тем не менее, есть довольно актуальный Как загрузить свою учетную запись PayPal?
Как загрузить свою учетную запись PayPal? Есть несколько способов сделать перевод на ваш счет PayPal. здесь найти больше информации о доступных вам опциях. Как сделать депозит с помощью PayPal? Выберите одну из следующих платформ (если есть). Настольное программное обеспечение: Войдите в систему, нажмите кнопку «Оформить заказ», а затем «Депозит». Затем нажмите на кнопку «PayPal» и следуйте инструкциям на экране. Что такое обновление панели управления Xbox и как его получить?
Что такое обновление панели управления Xbox и как его получить? Обновление панели мониторинга Xbox - это обычное явление, в котором Microsoft исправляет свой существующий сервис Xbox Live, чтобы добавлять новые функции, исправлять любые проблемы и улучшать пользовательский интерфейс. Думайте о них как о пакете обновления для Windows. Как правило, вам не нужно ничего предпринимать, чтобы запустить обновление, если ваша консоль подключена к сети, так как вам будет предложено установить Какие еще инструменты вы используете для управления вещами?
Какие еще инструменты вы используете для управления вещами? Есть ли у вас обзор вашего оборудования и управления, вы знаете, какие услуги вам подходят и какие услуги вам больше всего нравятся?
Есть ли у вас обзор вашего оборудования и управления, вы знаете, какие услуги вам подходят и какие услуги вам больше всего нравятся? Телевизионный канал поддержка. Бесплатное в интернете ТВ - есть? Да, но вы должны внимательно посмотреть, какой сервис вы используете для этой цели. Некоторые предположительно легальные предложения оказываются незаконными или, по крайней мере, юридически сомнительными, если присмотреться
Вы нашли это?
Разве это не весело?
Так что, это не невозможно написать код для вас, верно?
Так как же определить, действительно ли вы используете большую часть своей сети?
И как вы можете измерить производительность вашей сети не только на основе ощущений, но и в реальных цифрах?
3. Можно ли загрузить Cydia из Apple App Store?
3. Можно ли загрузить Cydia из Apple App Store?
4. Безопасен ли джейлбрейк?
Как загрузить файлы YouTube на планшет или смартфон?
Как загрузить файлы YouTube на планшет или смартфон?